The human hand is difficult to study. It has lots of muscles and it can move in many different ways.
In engineering terms, the hand has many “degrees of freedom.” In addition, the mechanics of the skin is
complicated, because it is “viscoelastic”-- it exhibits both viscous (liquid-like) and elastic (solid-like)
behavior when it is deformed. Finally, it's difficult to precisely measure electrical signals in the human brain.
For these and other reasons, we use rats and mice as models to study the sense of touch.
However… mice and rats typically use their whiskers more than their paws to tactually explore objects. If you used a
slow-motion video camera to watch a rat, as our laboratory does, you would see that it continuously brushes its whiskers
against objects between 5 and 25 times a second. This behavior is called "whisking." The rat touches different objects to
figure out their location, size, shape, and texture. You can see some videos of rat whisking behavior here.
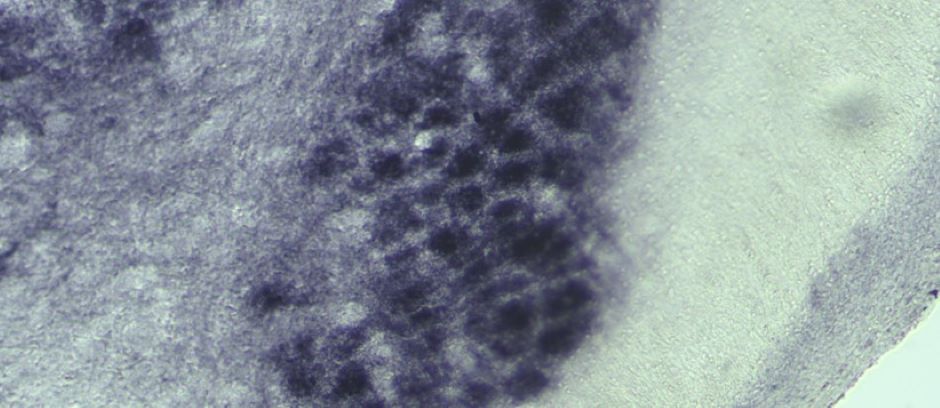
Whiskers are simpler to study than the hand, because they have no sensors along their length. They are like the hairs
on your head-- it doesn't hurt when you get a haircut, and it doesn't hurt when we cut off the whiskers of a rat (don't
worry-- we let them grow back). Because all sensing occurs at the whisker base, whiskers are mechanically “simple”
compared to the human hand. Whiskers can be modeled as cantilever beams. Mechanical engineers have studied cantilever
beams since the year 16xx, and probably longer.
The human brain contains a “somatopic map” of the human body. For example, neurons
that respond to touching the thumb are adjacent to neurons that respond to touching the
index finger. Neurons that respond to touching the index finger are between neurons that
respond to touching the thumb and neurons that respond to touching the third finger… and
so on.
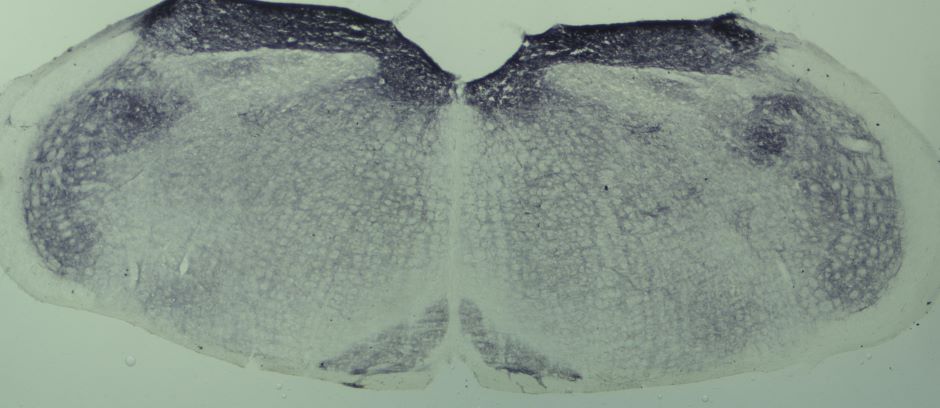
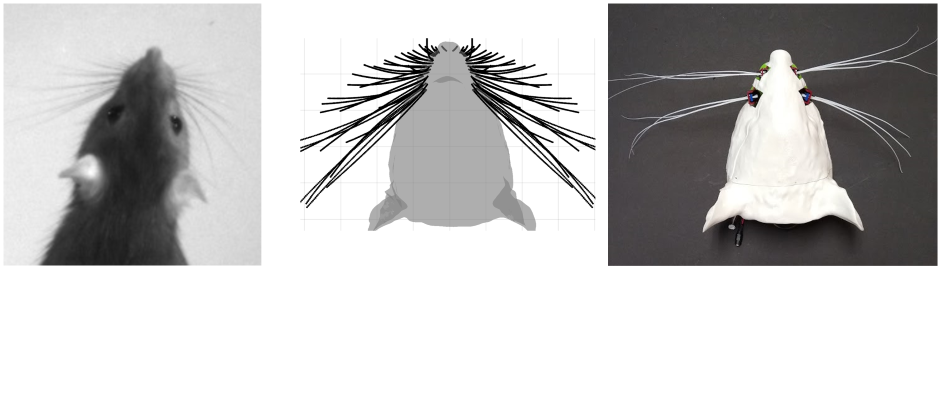
In the same way that humans have five fingers on each hand (and there are neural maps of
the hand in the human brain), rats have ~30 whiskers regularly arranged on each side of
the face, and there are maps of the whiskers in the ratss brain. Scientists can record the
electrical activity of neurons that respond to the touch of particular whiskers, or groups of
whiskers, and determine how touch information is transformed at each stage, or how
touch information is combined with movement.
About 50-80 laboratories worldwide study the rodent whisker system. The whisker system is
so important in the field of neuroscience that researchers even have their own conference,
held annually just before the Society for Neuroscience annual meeting.
Some laboratories use the whisker system to study brain plasticity or brain development and
aging. Brain plasticity describes how the brain can reorganize its structure, functions,
and connections in response to experiences, learning, and changes in the environment.
Brain development describes how the brain changes from infancy through adulthood.
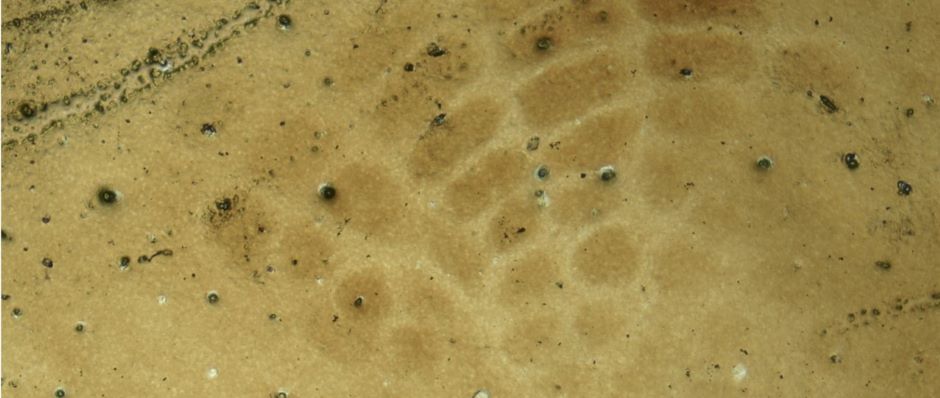
For example, if you cut off all an animal's whiskers near birth, the neural circuits that
represent the whiskers will not develop normally. If you cut off only one whisker, the
regions of the brain that would have represented that whisker get taken over by
neurons representing adjacent whiskers.
You use vision for a wide range of behaviors -- to walk, to scan the environment, to read, and
to read the facial expressions of other people. Animals use their whiskers in an equally wide
variety of behaviors, including locomotion, climbing, hunting, exploring, and social
interactions… the list goes on.
Our laboratory has shown that:
- Rats can move their whiskers asymmetrically-- sometimes even holding the whiskers
completely still on one side of the face, while continuously moving whiskers on the other
side.
- Rats use their whiskers to sense which way the wind is blowing. Importantly, our work
showed that rats not only can use their whiskers to send the wind direction, but they
choose to use their whiskers to sense wind direction, even when other cues are available.
You can read about the experiment here and watch some videos of rats running towards a
wind source.
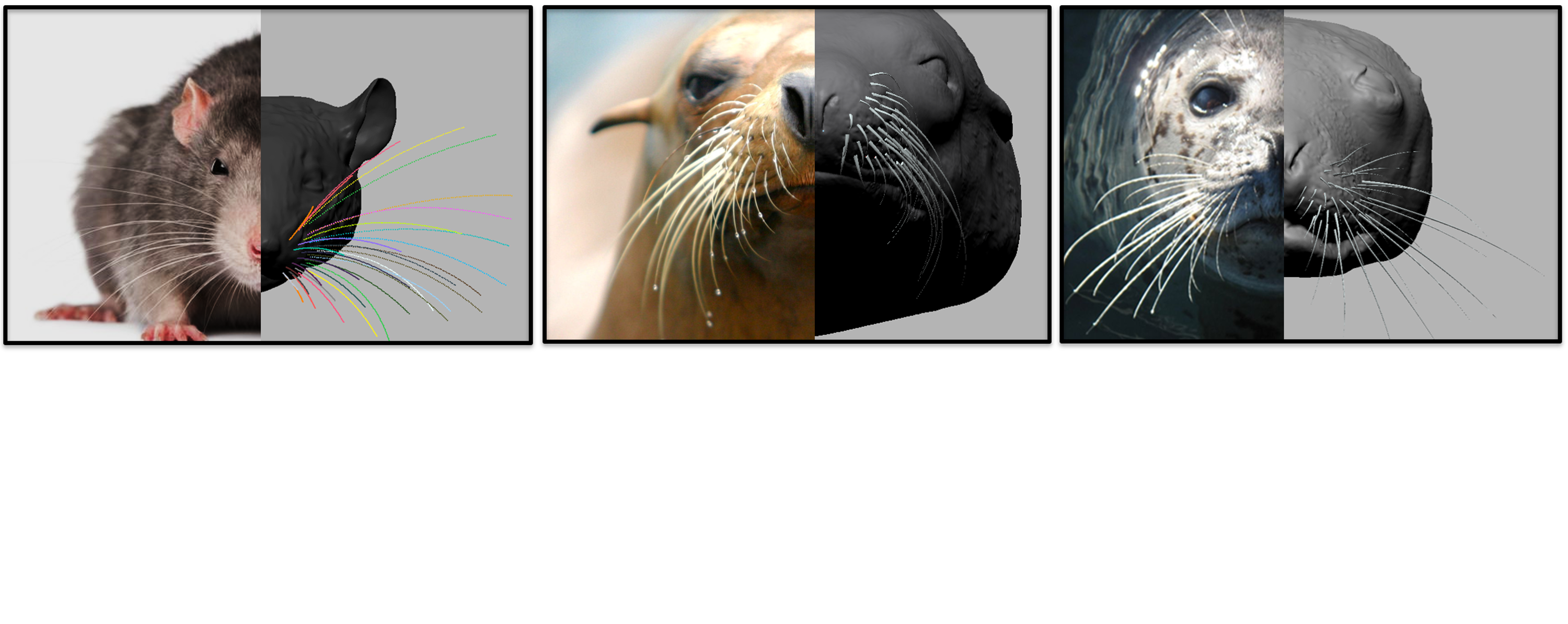
Yes. For example, seals and sea lions use their whiskers to track wakes to catch fish.
Our laboratory has recently become interested in how whiskers might help terrestrial animals
tell which way the wind is blowing. We did an experiment to show that rats not only can use
their whiskers to send the wind direction, but they choose to use their whiskers to sense wind
direction, even when other cues are available. You can read about the experiment here and
watch some videos of rats running towards a wind source.
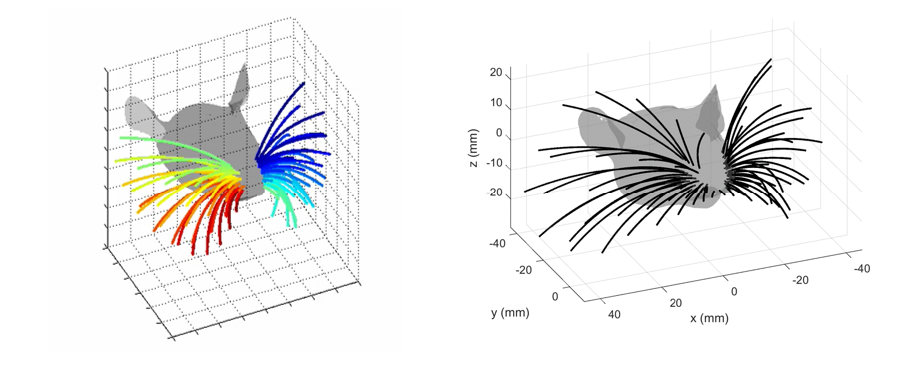
To better understand how whiskers might help an animal sense airflow, we have
recently begun to quantify the response of a whisker to airflow and an investigation of
the fluid mechanics around whiskers.
The people in our lab have backgrounds in applied math, biomedical engineering, computer
science, mechanical engineering, neuroscience, and physics. After graduation, some
students continue as post-docs and professors, while others choose to go to industry or
consulting. Click here for a list of current lab members and alumni.
Anne's Rat Page contains a wealth of information about rats and their behavior. Don’t miss
the videos showing how a human, a pigmented rat, and an albino rat might see the world.
Thank you, Anne, for this wonderful website.